
ロボットが正しくピッキングするためには、ガイドとなる座標を正しく出力することが欠かせません。
RobotFinderなら位置決めに、ヴィスコ独自のアルゴリズム、GradFinder®を活用。
高い検出精度を実現します。

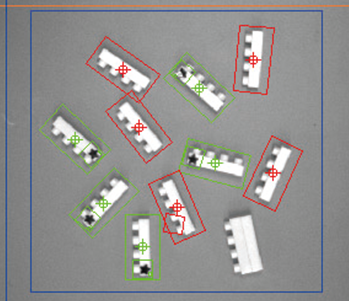
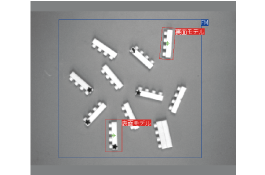
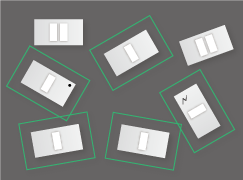
検査対象物が全てロボットがピッキングする面を向いているとは限りません。RobotFinderなら表面と裏面の両方を登録・判別できるので、用途に応じた検査が可能です。
表裏の判別可能なユニークな文字や記号などをサーチし、ピッキング対象かどうか、高い精度で判別します。

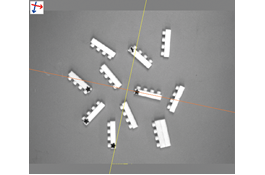
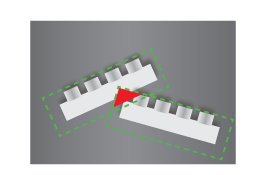
一回のサーチ実行で同一の対象を複数検出でき、その検出した座標をシリアル/ネットワークで 出力することができます。
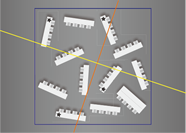
画像処理では画像の左上を原点としますが、ロボットの場合、必ずしもそうではありません。専用の座標系を設定できるのでロボットに合った座標の出力が可能です。
座標系・検出個数設定
サーチ設定
検出した座標をロボットへ出力する際の座標軸方向・回転角度などをチェックを入れるだけで簡単に設定できます。
表面・裏面のサーチモデルを登録、設定できます。
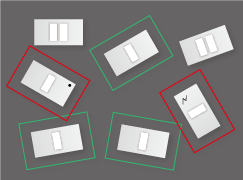
表裏条件の設定、距離条件として距離の計測、周辺の判別などの可否、また周辺条件としてしきい値の設定ができます。
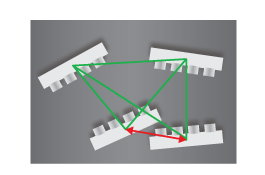
対象間の距離を計測するので、対象物が重なっていたり、くっついたりして、ロボットがピッキングできないケースを判定します。
ロボットがピッキングする領域に別の対象物や異物などがないか、周辺を判別。ピッキング可能な対象のみを選別します。
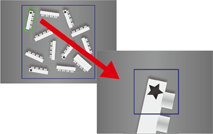
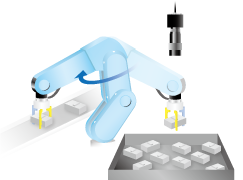
画像内にある複数の対象物に、一度の設定で検査を繰り返し実行できる「動的マルチ座標系」。
このツールを使うと、「RobotFinder」と「検査ツール」を組み合わせることが可能になります。
|
RobotFinder |
|
動的マルチ座標系+ブロブ検査 |
|
|
 |
▶︎ |
 |
▶︎ |
 |
|
登録モデルと同一の対象物を検出 |
|
検査を繰り返し実行 |
|
良品のみをロボットでピッキング |
コネクタ生産の各工程で
「使える」アイテムをご提案
コネクタ検査ガイド
ダウンロードはこちら

ダウンロードはこちら

画像処理検査の概要や、メリット、目視検査との違い、利用シーンなど本ダウンロード資料で画像処理の全体像をつかむことができます。
画像処理検査装置を導入しようとしているが、イメージがわかない、検査の自動化について概要を知りたい、という方は是非ご覧ください。
私たちは、外観検査・画像処理検査に関するエキスパート集団です。単なるメーカーではなく、画像処理アルゴリズム、光学技術、電気・機械の知識と経験を兼ね備える外観検査・画像処理検査装置メーカーとして、総合的なコンサルティングも可能とする、開発型エンジニアリング企業です。








