ロボットのピッキング
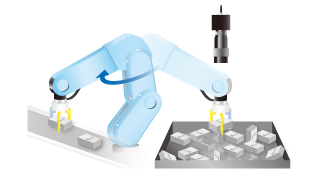
どのワークを掴むか設定が難しく、
ピッキング精度が低い
ヴィスコのロボット専用ツールなら、
判定基準の画像を登録するだけなので設定が容易で、
安定した2Dピッキングを実現。
容器ラベルのずれ・はがれ検査
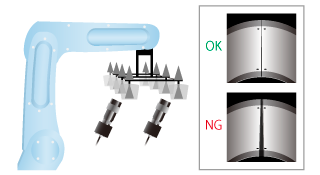
ワークの機構・搬送などの問題で
カメラが設置できない
斜めからでも全面にピントが合う
ヴィスコの超深度カメラなら、
機構の邪魔にならない設置を実現。


ロボット搬送中の樹脂成形カップのラベルの位置ずれを検査します。高速での搬送を考慮して、カメラはカップの斜め下に配置しました。斜めからの撮像でも、カップ側面の上から下までピントが合い、高精度な検査が可能です。

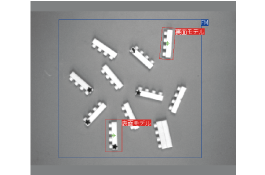
検査対象物が全てロボットがピッキングする面を向いているとは限りません。RobotFinderなら表面と裏面の両方を登録・判別できるので、用途に応じた検査が可能です。
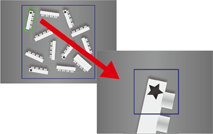
表裏の判別可能なユニークな文字や記号などをサーチし、ピッキング対象かどうか、高い精度で判別します。

一回のサーチ実行で同一の対象を複数検出でき、その検出した座標をシリアル/ネットワークで 出力することができます。
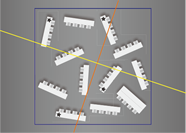
画像処理では画像の左上を原点としますが、ロボットの場合、必ずしもそうではありません。専用の座標系を設定できるのでロボットに合った座標の出力が可能です。
座標系・検出個数設定
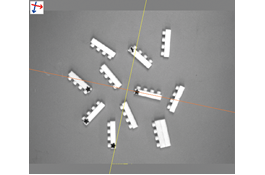
サーチ設定
検出した座標をロボットへ出力する際の座標軸方向・回転角度などをチェックを入れるだけで簡単に設定できます。
表面・裏面のサーチモデルを登録、設定できます。
表裏条件の設定、距離条件として距離の計測、周辺の判別などの可否、また周辺条件としてしきい値の設定ができます。
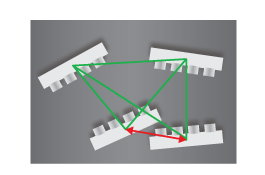
対象間の距離を計測するので、対象物が重なっていたり、くっついたりして、ロボットがピッキングできないケースを判定します。
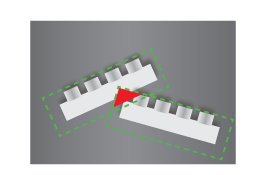
ロボットがピッキングする領域に別の対象物や異物などがないか、周辺を判別。ピッキング可能な対象のみを選別します。

画像処理検査装置の導入を検討しているけど、
具体的にいつ・何を・どのようにすればいいのか分からない、
そのようなお悩みを図解で分かりやすく解決します。
私たちは、外観検査・画像処理検査に関するエキスパート集団です。単なるメーカーではなく、画像処理アルゴリズム、光学技術、電気・機械の知識と経験を兼ね備える外観検査・画像処理検査装置メーカーとして、総合的なコンサルティングも可能とする、開発型エンジニアリング企業です。