
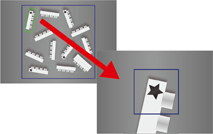
為了讓機械手正確抓取,導引坐標的正確輸出是不可或缺的。
RobotFinder在定位方面活用了ViSCO獨創的算法GradFinder®。實現了高精度的檢查。

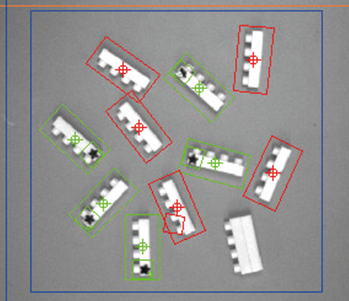
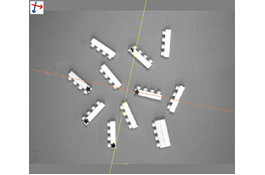
檢查對象不一定全部都是機械手抓取的方向。RobotFinder 會登錄和判別正反面,可根據用途完成檢查。
搜索可判別正反的特殊文字和記號等,並以高精度判別是否屬於抓取對象。

執行一次搜索,便能檢出複數個相同的對象,並以串列/ 網路方式來輸出其檢出座標。
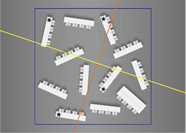
影像處理會把影像左上作為原點,但是機械手的話可以設定專用的坐標系,可輸出符合機械手的座標。
座標系・検出個数設定
搜索設定
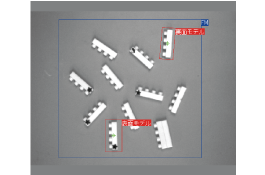
檢出坐標輸出到機械手時的坐標軸方向以及旋轉角度等只需勾選就能完成設定。
登錄並設定正反面的搜索模版。
可以設定正反條件、作為距離條件的距離測定,週邊判別可否確定,以及當作週邊條件設定閾值。
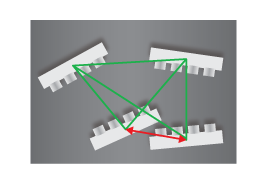
以物體之間的距離來確認是否有重疊或貼在一起等,從而判定機械手能否抓取。
判別械手抓取範圍內有無其他對象物或是異物。只選定可抓取的對象。
我們是外觀檢查、影像處理檢查相關的專業團隊。不單只是製造商,還兼備了影像處理演算法、光學技術、電氣、機械的知識和經驗,並且能夠處理綜合性咨詢的開發型工程的企業。







