
In order for a robot to pick with accuracy, output of accurate coordinate to guide is required. RobotFinder utilizes ViSCO's proprietary algorithm, GradFinder® for alignment. High detection accuracy is made possible.

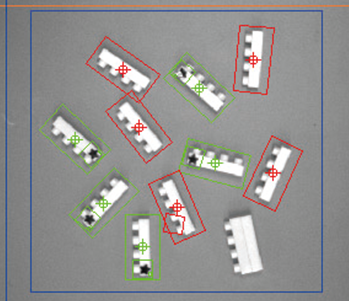
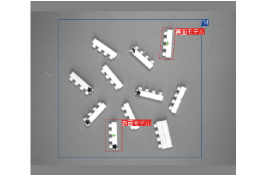
All the target may not face the same direction to be picked up. RobotFinder can train/judge top and bottom sides, which is useful for various applications.
The system searches for unique characters or signs to tell which side of a target is facing up, and to accurately judge whether which target can be picked up.

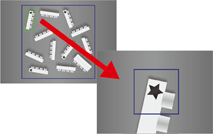
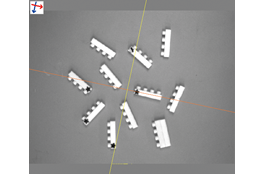
One search to detect multiple inspection targets; detected coordinate can be output via serial/network.
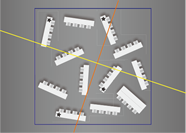
In image processing, left top of an image is set as datum point, however, robot does not always apply the same coordinate rule. VTV-9000 supports coordinate output for a robot that requires its own coordinate system.
Configuration for coordinate
system and detection number
Search configuration
Configure coordinate axis orientation/rotation angle when outputting detected coordinate to robot.
Train search models for top and bottom sides to configure.
Condition of top/bottom side, distance measurement to be used as distance condition, availability of periphery judgment, or threshold value setting as periphery condition can be configured.
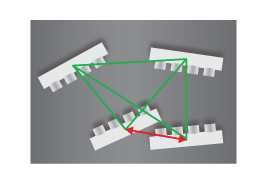
Measure distance between targets; judge whether robot can pick targets up or not by checking targets' overlapping or connecting one another.
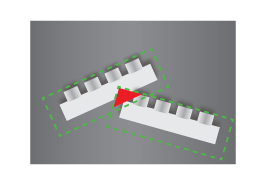
Robot's pick-up region is checked for any foreign substance or wrong target. The system judges which target Robot can pick up.
We are an expert group in the field of visual inspections and image processing inspections. We are not just a manufacturer. Instead, we are a visual inspection and image processing inspection system manufacturer that combines knowledge of and experience related to image processing algorithms, optical technology, electronics, and machinery in order to provide comprehensive consulting as a development engineering company.







