
로봇이 정확하게 추출하기 위해서는 반드시 정확한 가이드 좌표를 출력해야 합니다.

검사 대상물이 모두 로봇의 피킹면을 향해 있을 수는 없습니다. RobotFinder는 표면과 이면 양측을 등록 및 판별할 수 있어 용도에 맞게 검사가 가능합니다.
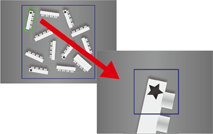
표리가 판별 가능한 유니크한 문자나 기호 등을 검색하고, 피킹 대상이 맞는지에 대해 고정밀도로 판별합니다.

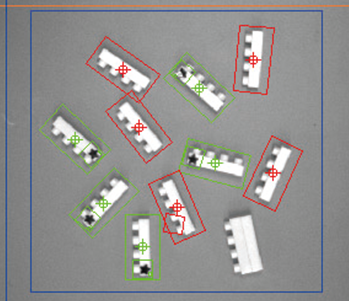
한 번의 검색으로 동일한 대상을 복수 검출 가능하며, 그 검출 좌표를 시리얼/네트워크로 출력 가능합니다.
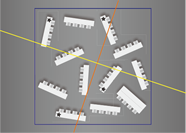
화상 처리에서는 화상의 좌측 위를 원점으로 하지만, 로봇의 경우 전용 좌표계의 설정도 가능하므로 로봇에 맞춘 좌표 출력이 가능합니다.
좌표계,검출 갯수 설정
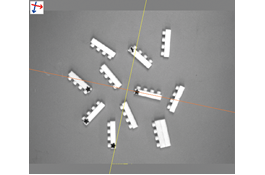
검색 설정
검출한 좌표를 로봇에 출력할 때의 좌표축 방향,회전 각도 등을 체크하기만 하면 쉽게 설정됩니다.
표면,이면의 검색 모델을 등록하고 설정할 수 있습니다.
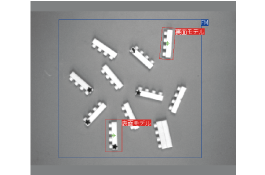
표리 조건의 설정,거리 조건으로서 거리의 계측,주변의 판별 등 가능성 여부, 또한 주변 조건으로서 한계값 설정이 가능합니다.
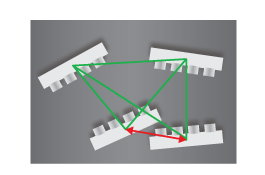
대상간의 거리를 계측하여 대상물이 겹쳐져 있거나 붙어 있어 로봇이 추출할 수 없는 케이스를 판정합니다.
로봇이 추출하는 영역에 다른 대상물이나 이물질 등이 없는지 주변을 판별합니다. 추출 가능한 대상만 선택합니다.
저희는 외관검사,화상처리 검사와 관련된 전문가들입니다. 때문에 단순한 메이커가 아닌 화상처리 알고리즘,광학기술,전기/기계의 지식 및 경험을 겸비한 화상처리 검사장치 제조업자로서 종합적인 컨설팅도 가능한 개발형 엔지니어링 기업입니다.






